Table of Contents
HF-Net: Robust Hierarchical Localization at Large Scale
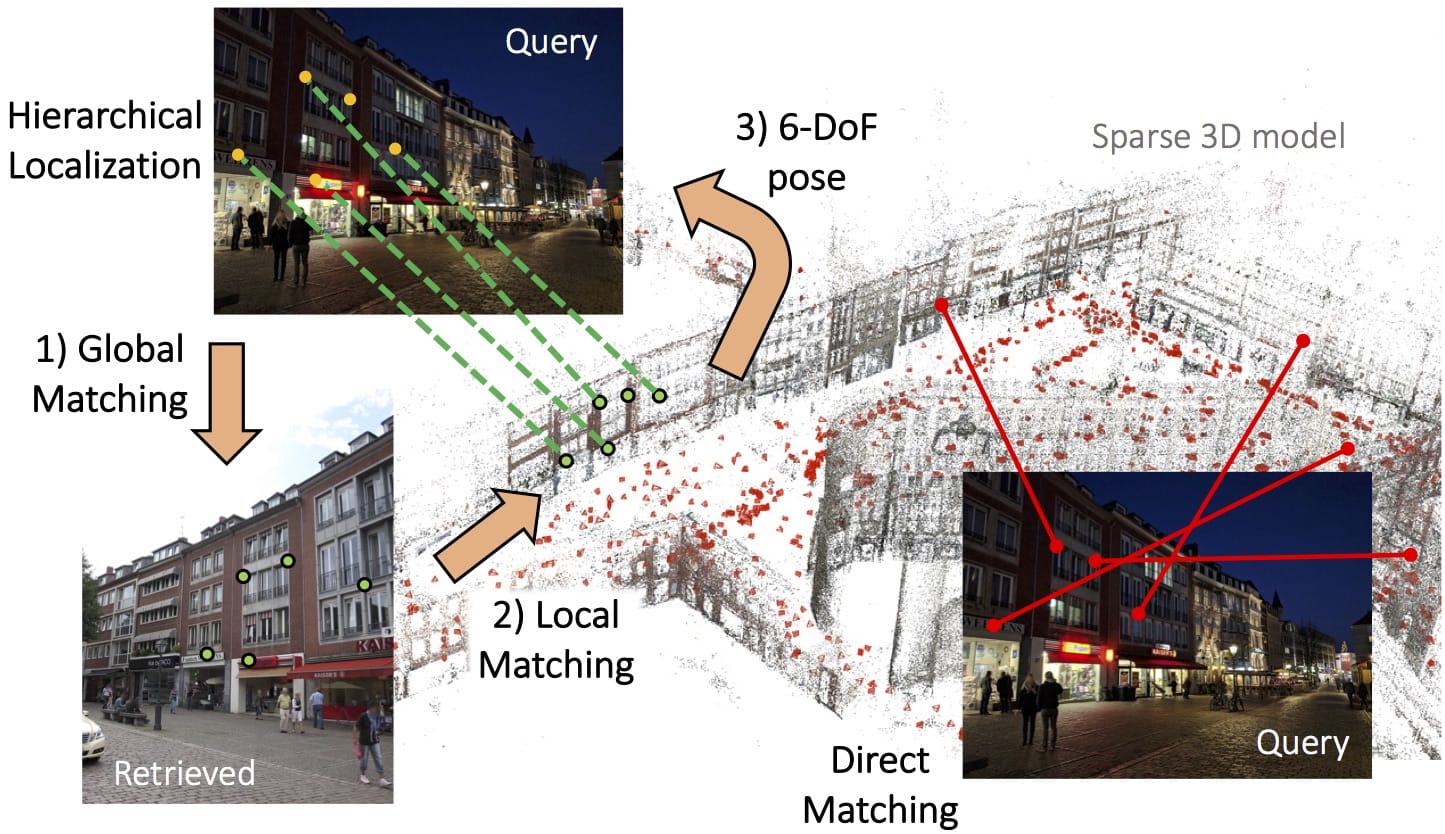
We introduce a 6-DoF visual localization method that is accurate, scalable, and efficient, using HF-Net, a monolithic deep neural network for descriptor extraction. The proposed solution achieves state-of-the-art accuracy on several large-scale public benchmarks while running in real-time.
Download SfM Models and Trained Weights
Navigate to http://robotics.ethz.ch/~asl-datasets/2019_CVPR_hierarchical_localization/ for the list of all files available for download or select specific items in the list below.
SfM Models
SfM models built with SuperPoint, and usable with HF-Net, for the following datasets: Aachen Day-Night, CMU Seasons, Extended CMU Seasons and RobotCar Seasons.
Trained Weights and TF Graph for HF-Net
The Tensorflow graph and trained weights.
GitHub Repository
Apart from this collection of SfM models and the trained Tensorflow graph, we also share our source code to train the network, perform inference and full 6-DoF pose retrieval.
The soures in https://github.com/ethz-asl/hfnet allow you to:
- Perform state-of-the-art 6-DoF hierarchical localization using a flexible Python pipeline
- Train HF-Net with multi-task distillation in TensorFlow
- Evaluate feature detectors and descriptors on standard benchmarks
- Build Structure-from-Motion models based on state-of-the-art learned features
Citation
Please consider citing the corresponding publication if you use this work in an academic context:
@inproceedings{sarlin2019coarse,
title={From Coarse to Fine: Robust Hierarchical Localization at Large Scale},
author={Sarlin, P.-E. and Cadena, C. and Siegwart, R. and Dymczyk, M.},
article={CVPR},
year={2019}
}