IROS 2011 Paper Kinect Dataset
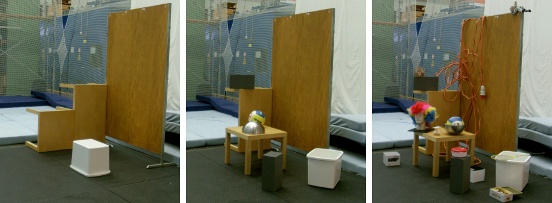
You can download the 2.6 GB .tar.bz2 file. The images above show the 3 different experimental setups.
This dataset is the companion of our 2011 IROS paper (full text). This dataset contains 27 ROS bags of point clouds produced by a Kinect based the ground truth obtained from a Vicon pose capture system. These runs cover 3 environments of increasing complexity, with 3 types of motions at 3 different speeds. This dataset can be used with our ICP Mapper to track the pose of the Kinect and to explore parameters of ICP algorithms.
This dataset is linked to the following paper:
F. Pomerleau, S. Magnenat, F. Colas, M. Liu, R. Siegwart, "Tracking a Depth Camera: Parameter Exploration for Fast ICP", Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2011 (full text).
Quick Start
This assume that you have the ROS package ethzasl_icp_mapping installed. Instructions can be founded here. The source code evolve quite a bit since the publication of the article. The most visible modification is the creation of a local map instead of using only the last point cloud for registration.
Here is a quick way to test it:
$ roscore & $ rosparam set use_sim_time true $ cd <your data set repository> $ rosbag play --clock --pause 0high-0slow-0fly-0_2011-02-19-11-44-41.bag
In an other console:
$ roscd ethzasl_icp_mapper/launch/openni/IROS_2011 $ roslaunch tracker.launch
Finally, to view what is going on:
$ roscd ethzasl_icp_mapper/launch/openni/IROS_2011 $ rosrun rviz rviz -d IROS_2011_rviz.vcg
Then, you just need to go back to your console with the rosbag started in and press spacebar to unpause the playback.
Tested on Ubuntu 12.04, ROS Fuerte. If it is working on other version, please tell us.
ethzasl_icp_mapping package revision: git commit 403f5e8b2c604d7291fbfccb1878683a84fa3212