Table of Contents
RGBD Dataset with Structure Ground Truth (for Voxblox)
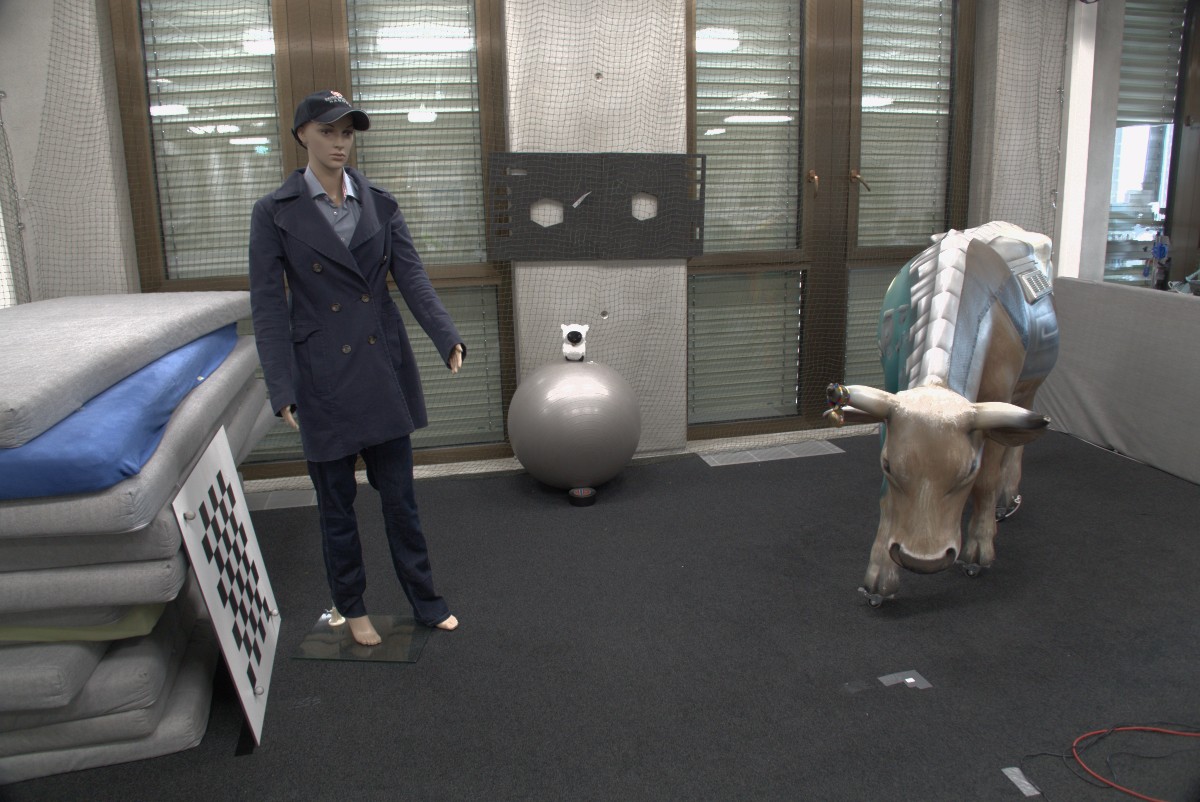
This page is for a small dataset featuring structure ground truth, vicon poses, and colored RGB pointclouds of a small indoor scene with a cow, mannequin, and a few other typical office accessories. Most importantly, the dataset also contains structure ground truth as a PLY Pointcloud, created from multiple scans with a Leica MS50 professional laser scanner.
The paper accompanying these data sets will be published in IROS 2017, and for now available in arXiv on:
Helen Oleynikova, Zachary Taylor, Marius Fehr, Juan Nieto, and Roland Siegwart, “Voxblox: Building 3D Signed Distance Fields for Planning”, In IEEE Int. Conf. on Intelligent Robots and Systems (IROS), October 2017. pdf, bibtex
The source code for working with this data is available at voxblox on github.
Structure of the Dataset
The dataset consists of three main parts: the rosbag file with the sensor data, the calibration information, and the structure ground truth as a pointcloud file. The structure ground truth is aligned to the vicon coordinate frame, and the calibration file provides the transform from the camera frame to the vicon sensor frame origin. The calibration and ground truth are bundled together, and the bag file is available separately.
The bag information is as follows:
path: data.bag
version: 2.0
duration: 2:22s (142s)
start: Sep 10 2016 17:28:58.62 (1473521338.62)
end: Sep 10 2016 17:31:21.40 (1473521481.40)
size: 25.9 GB (uncompressed), 4.5 GB (compressed)
messages: 16410
compression: none [2832/2832 chunks]
types: geometry_msgs/TransformStamped [b5764a33bfeb3588febc2682852579b0]
sensor_msgs/PointCloud2 [1158d486dd51d683ce2f1be655c3c181]
topics: /camera/depth_registered/points 2831 msgs : sensor_msgs/PointCloud2
/kinect/vrpn_client/estimated_transform 13579 msgs : geometry_msgs/TransformStamped
So the pointcloud data is provided as XYZRGB pointclouds on the /camera/depth_registered/points topic and the transformation from the world frame to the vicon sensor location is provided on /kinect/vrpn_client/estimated_transform as a TransformStamped.
The data was gathered with a Kinect 1, and a photograph of the original scene can be seen below: